Last updated: Jul / 25 /2024 Kashu Yamazaki kyamazak@andrew.cmu.edu
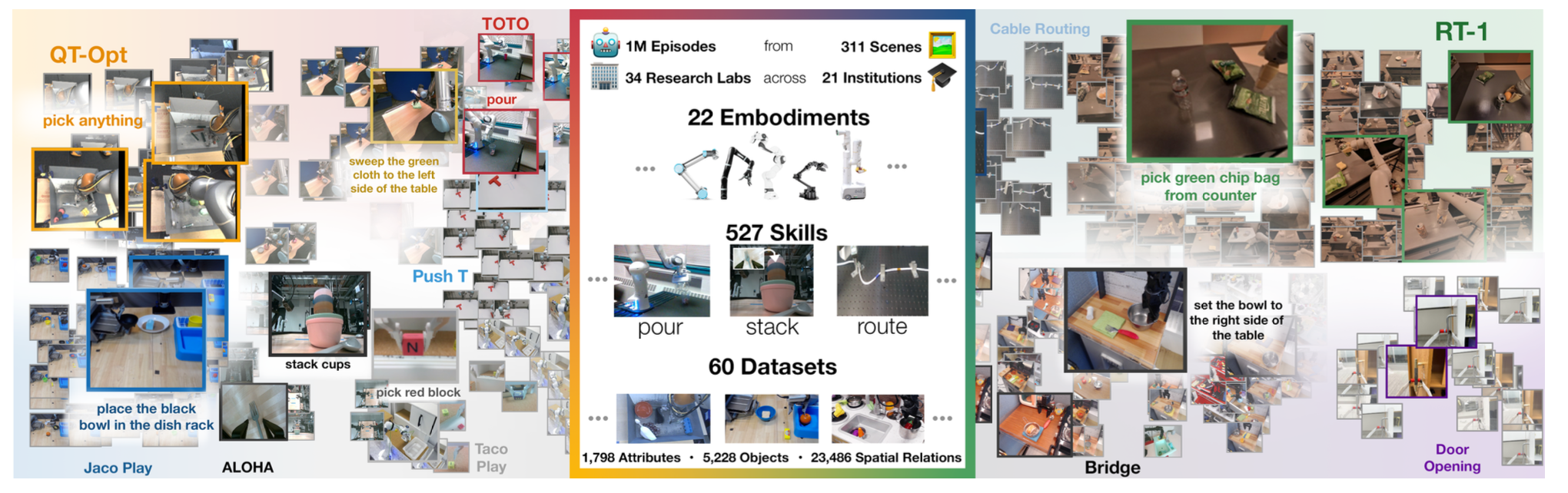
A large-scale collection of datasets from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). The dataset follows the RLDS format.
RLDS
DROID uses the same hardware setup using Panda robot across all 13 institutions to streamline data collection while maximizing portability and flexibility.